Intel RealSense D435の距離の誤差について
Intel RealSense D435の距離の誤差
これまで Intel RealSense について何回かご紹介しましたが、 Intel RealSense D435 の実際の誤差はどれくらいでしょうか。当然のことながら、投影面の中央と端ではセンサまでの距離が異なります。実際の距離とセンサから得られた値を比較してみましたので、その結果を紹介したいと思います。
測定方法
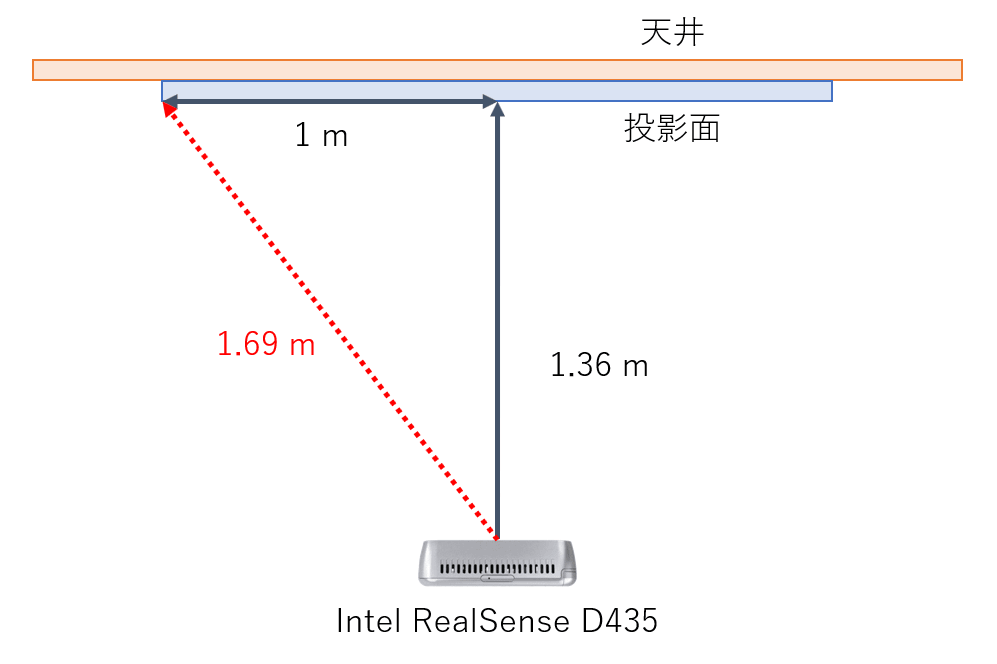
Intel RealSense D435 の距離測定は、障害物がない天井を利用しました。以下の図のように、天井から1.36m の位置に Intel RealSense D435を天井に向けて設置しました。このとき、投影面の横端に位置する箇所の距離は 1.69m となっています。
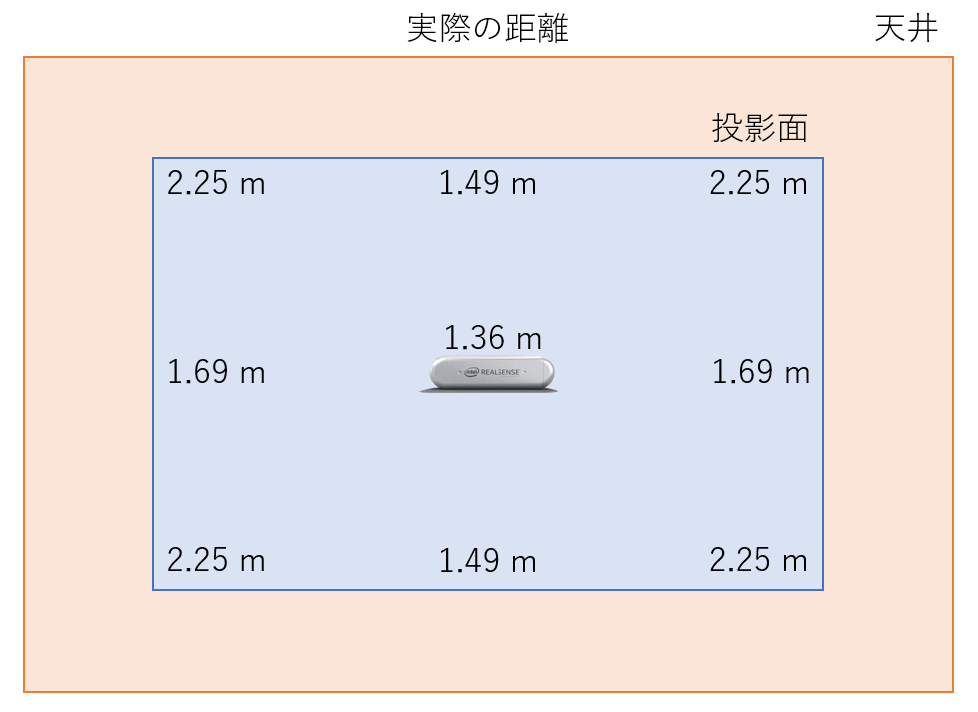
ほか投影面に対して、センサからのそれぞれ距離は次の通りです。最も最短距離は 1.36m ですが、隅は 2.25m と距離が 1.6 倍異なります。
Intel RealSense Viewer のイメージ
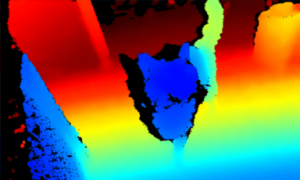
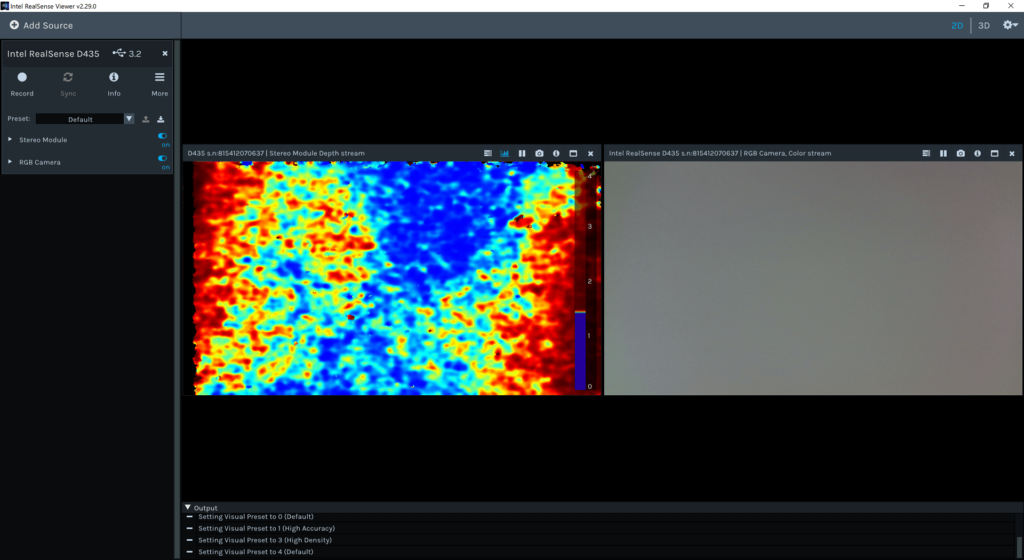
Intel RealSense Viewer のPresetは Default の状態です。カメラで見ると、右のように一面真っ白な天井です。左は深度を示していますが、色に斑があることが一目でわかります。中央は青が多いですが、左右の端は赤が強くなっています。
それぞれの箇所の値をピックアップすると次のようになります。
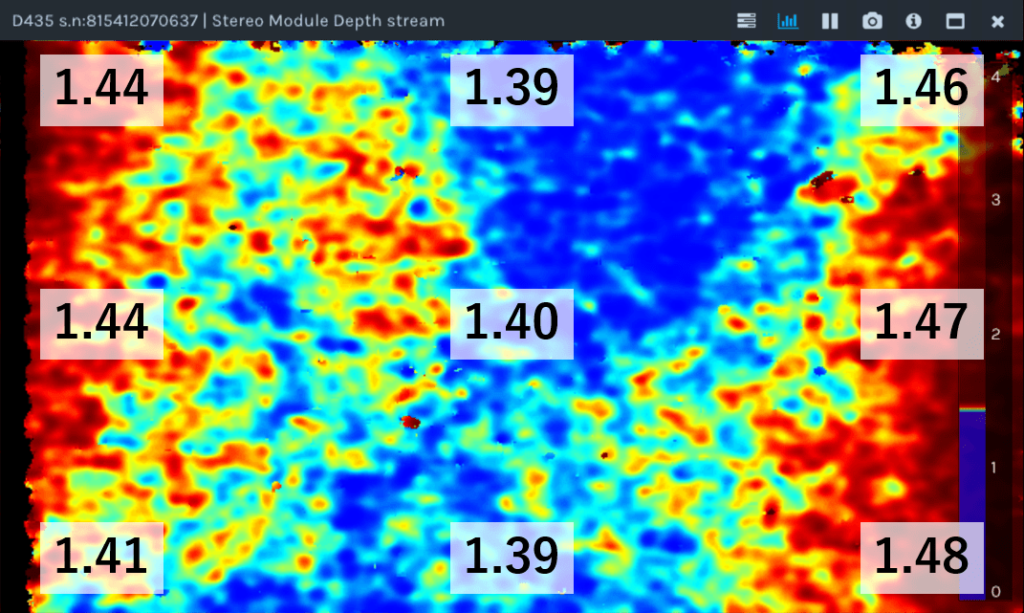
まず中央の値は実距離 1.36m に対して、取得した値は 1.40 と単位をメートルと考えるとほぼ一致しており、その誤差はわずか 3% 程度です。
一方、左右の端は平均 1.44 と実距離 2.25 とは全く異なる値です。恐らく、Intel RealSense D435 において補正が掛けられているのでしょう。ただしそれでも誤差は大きく、センサを平行移動させ最短距離の 1.36m と比較すると、その誤差は 4 ~ 8% と幅があります。
通常、センサに捉えたい対象が中央にくるようにセンサを設置しますが、10%程度の誤差を許容できるのであれば、センサの端も利用できるでしょう。
まとめ
Intel RealSense D435 の実際の誤差について調査しました。Intel RealSense Viewer から得られた中央の値は、実距離と誤差 3% 程度と良い結果が得られました。また周り値は、 Intel RealSense により補正が掛けられているものの、左右の端の誤差は 4 ~ 8% 程度であり、中央に比べると精度は悪くなっています。ただし、それでも最大 8% 程度の誤差であるため、距離が 10% 異なっても良いのであれば、左右もトラッキングしても問題ないでしょう。
TKS2では、Intel RealSenseを用いたセンシングのプロジェクトも可能ですので、もしお困りのときはぜひお声がけください。